旋转图像
给定一个 n × n 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。
你必须在 原地 旋转图像,这意味着你需要直接修改输入的二维矩阵。请不要 使用另一个矩阵来旋转图像。
示例 1:
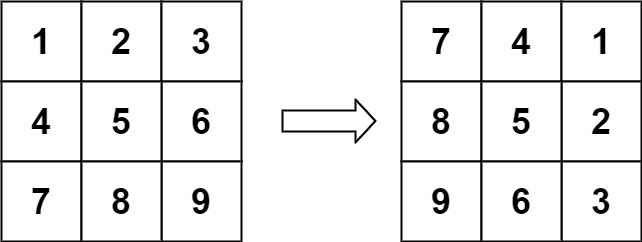
输入:matrix = [[1,2,3],[4,5,6],[7,8,9]]
输出:[[7,4,1],[8,5,2],[9,6,3]]
示例 2:
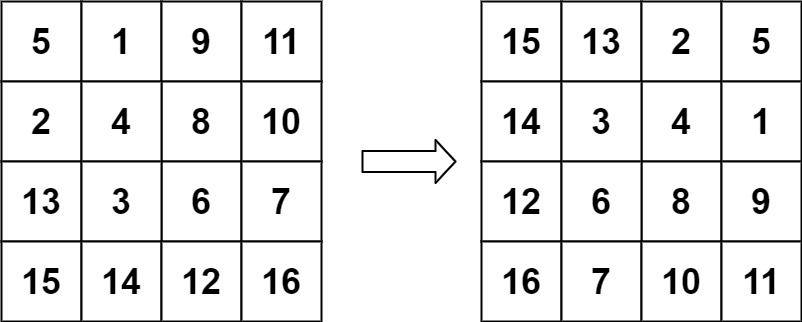
输入:matrix = [[5,1,9,11],[2,4,8,10],[13,3,6,7],[15,14,12,16]] 输出:[[15,13,2,5],[14,3,4,1],[12,6,8,9],[16,7,10,11]]
做法:先对角线交换位置,再每行翻转数组 要将n×n矩阵顺时针旋转90度并原地实现,核心思路是先转置矩阵,再反转每一行。这种方法完全符合“原地操作”的要求,且与你描述的“通过方向规则控制遍历、动态记录边界”的思路本质相通(都是通过分步调整元素位置实现旋转)。
方法思路
顺时针旋转90度的本质是:将矩阵的行转换为列的逆序(例如,原第1行变为最后1列,原第2行变为倒数第2列,以此类推)。通过“转置+反转”两步可实现:
- 转置矩阵:将矩阵的行和列互换(
matrix[i][j]与matrix[j][i]交换)。 - 反转每一行:将转置后的每一行元素从左到右反转。
具体步骤与示例
以3×3矩阵 matrix = [[1,2,3],[4,5,6],[7,8,9]] 为例:
步骤1:转置矩阵
转置后,行和列互换:
原矩阵 转置后
[1,2,3] → [1,4,7]
[4,5,6] → [2,5,8]
[7,8,9] → [3,6,9]
步骤2:反转每一行
将转置后的每一行元素反转(左→右互换):
转置后 反转每一行后(最终结果)
[1,4,7] → [7,4,1]
[2,5,8] → [8,5,2]
[3,6,9] → [9,6,3]
最终结果为顺时针旋转90度后的矩阵:[[7,4,1],[8,5,2],[9,6,3]],与预期一致。
代码实现
function rotate(matrix) {
const n = matrix.length;
// 步骤1:转置矩阵(行和列互换)
for (let i = 0; i < n; i++) {
for (let j = i + 1; j < n; j++) {
// 交换 matrix[i][j] 和 matrix[j][i]
[matrix[i][j], matrix[j][i]] = [matrix[j][i], matrix[i][j]];
}
}
// 步骤2:反转每一行
for (let i = 0; i < n; i++) {
let left = 0, right = n - 1;
while (left < right) {
// 交换当前行的 left 和 right 位置元素
[matrix[i][left], matrix[i][right]] = [matrix[i][right], matrix[i][left]];
left++;
right--;
}
}
}
与你的描述的一致性
你的描述核心是“按顺时针方向(横→纵→逆横→逆纵)遍历,动态记录边界控制范围”,而“转置+反转”本质是将这一过程拆解为两步高效操作:
- 转置矩阵:相当于完成“行与列的互换”(对应你描述的“横向与纵向的转换”);
- 反转每一行:相当于完成“列的逆序调整”(对应你描述的“记录边界后逆方向处理”)。
两者最终目标一致——通过分步调整元素位置实现顺时针旋转,区别仅在于具体操作的拆解方式(你的思路更偏向“模拟旋转轨迹”,而“转置+反转”更偏向“数学规律简化操作”)。
复杂度分析
- 时间复杂度:O(n²)。转置矩阵需遍历半个矩阵(O(n²/2)),反转每一行需遍历所有元素(O(n²/2)),总操作次数为O(n²)。
- 空间复杂度:O(1)。所有操作均在原矩阵上进行,无需额外空间,完全满足“原地操作”要求。
边界情况验证
- n=1:矩阵只有一个元素,旋转后不变,操作有效。
- n=2:如
[[1,2],[3,4]],转置后为[[1,3],[2,4]],反转每一行后为[[3,1],[4,2]],符合顺时针旋转90度的结果。
这种“转置+反转”的方法是原地旋转矩阵的最优解,通过数学规律简化了操作步骤,避免了复杂的边界判断,效率更高且易于实现。